

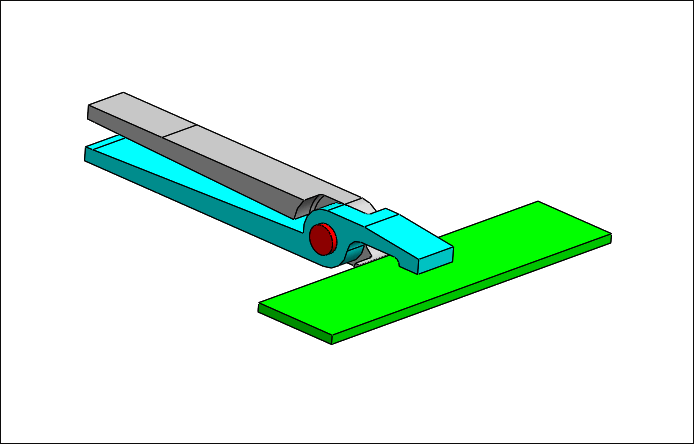
当分析一个装配体时,我们必须理解每个零部件之间是如何接触的,这样才能正确计算出接触时产生的应力和变形。下面我们来一起分析一个虎钳受力分析。
文章末尾下载模型
方法:
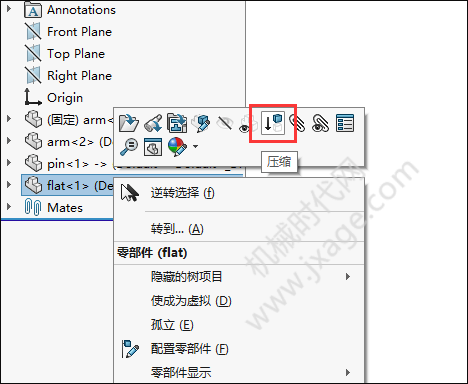
1.打开零件。因为我们对钳臂和平板的接触应力不感兴趣,因此我们将平板进行压缩。
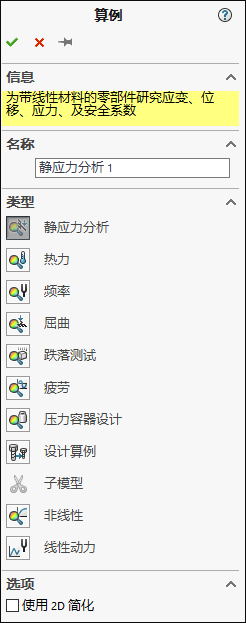
2.我们新建一个静应力分析的算例,如下图所示。
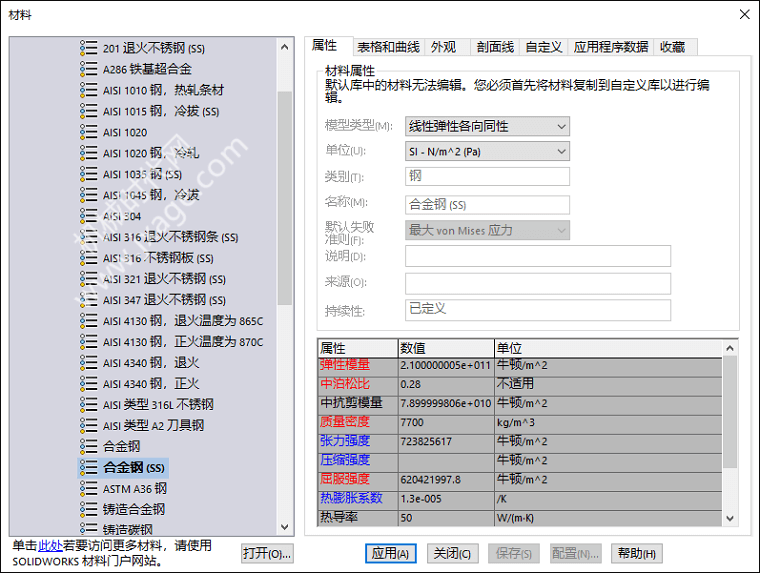
3.设置材料。我们需要为模型指定模型的材料属性。点击选中模型,鼠标右键选择“应用/编辑材料”。
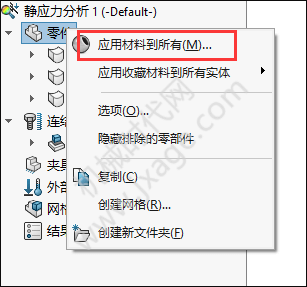
指定模型的材料为合金钢(SS),如下图所示。
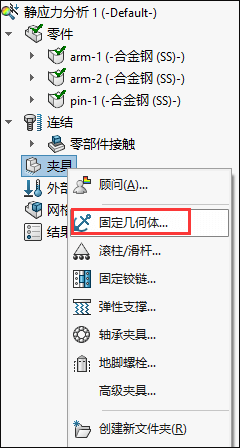
4.添加夹具。为了完成静态分析,我们在支架的上部添加固定几何体约束。点击夹具鼠标右键选择“固定几何体”。
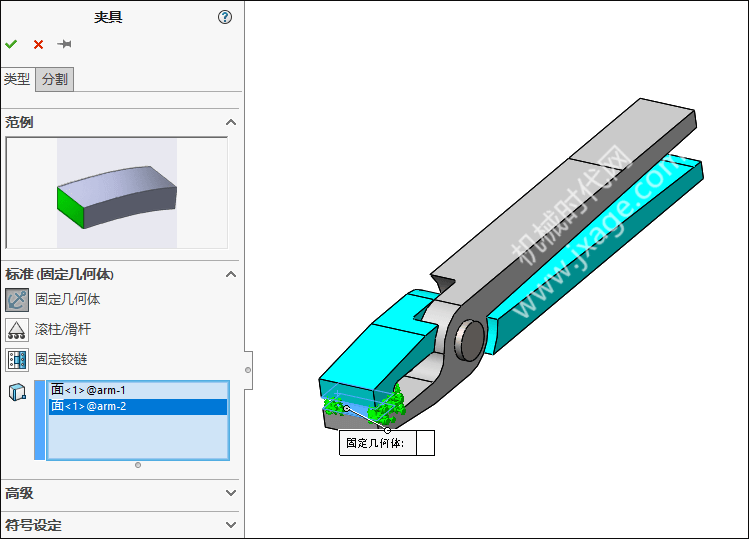
在如下图所示的两个面上添加固定几何体约束。
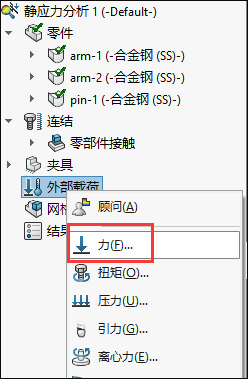
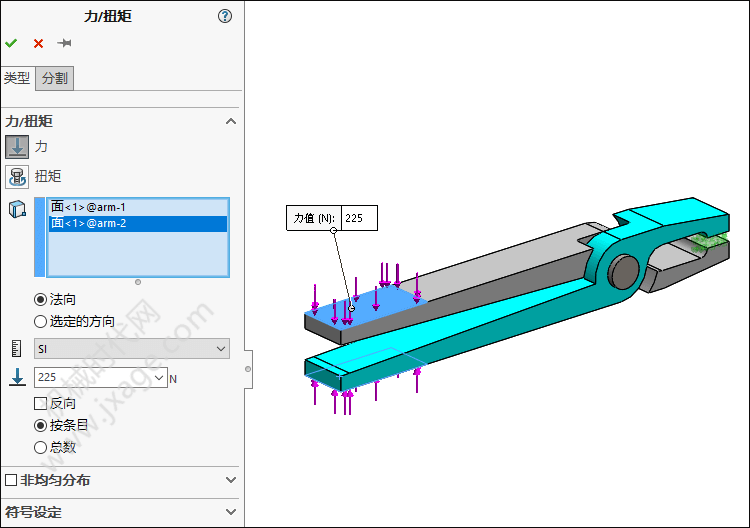
5.添加外部载荷。模型约束好之后,我们需要向模型施加外部载荷。选择外部载荷,鼠标右键选择“力”。
在如下图所示的钳臂末端上施加225N的压力。
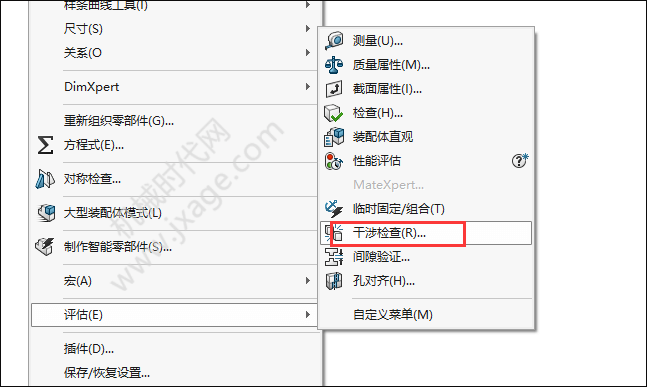
6.检查存在的干涉。点击【工具】-【评估】-【干涉检查】。
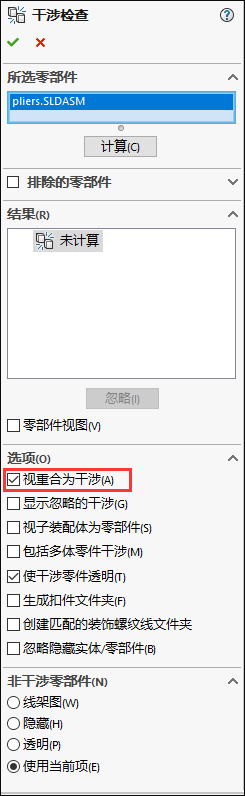
勾选“视重合为干涉”,点击“计算”。
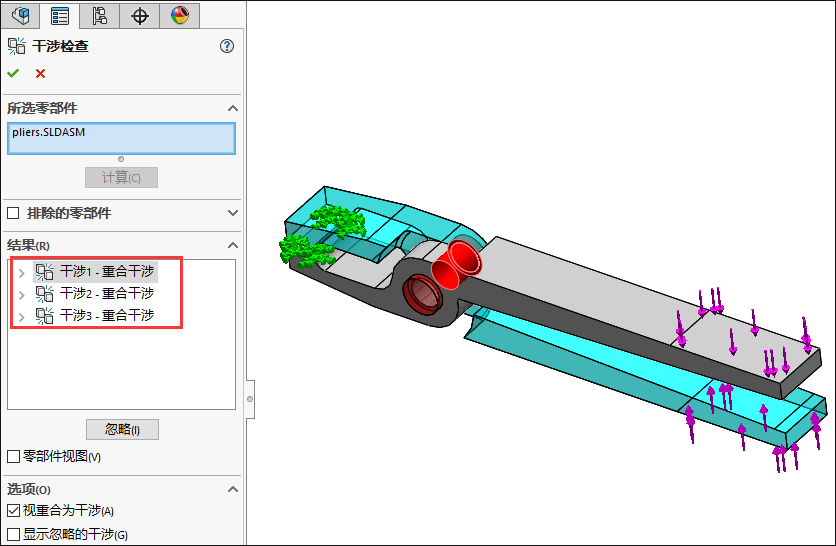
我们可以看到装配体中有3对表面互相接触,如下图所示。
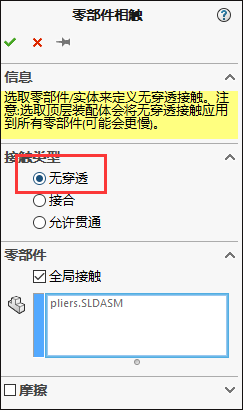
7.设置零部件的接触选项。
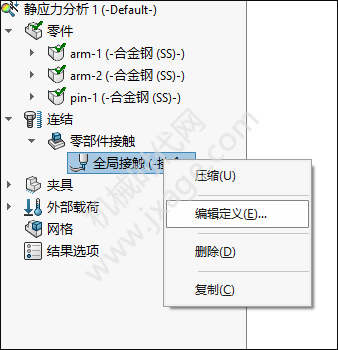
设置接触类型为“无穿透”。
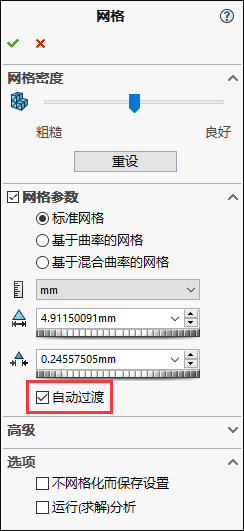
8.划分网格。
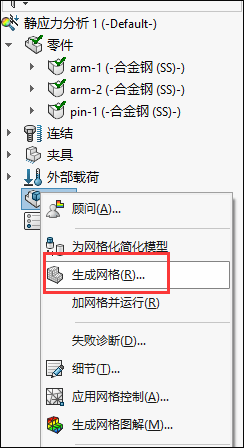
使用默认单元大小对模型划分网格,勾选“自动过渡”。
网格划分完成之后如下图所示。

9.运行分析。
将装配体爆炸开来,方便我们查看分析结果。
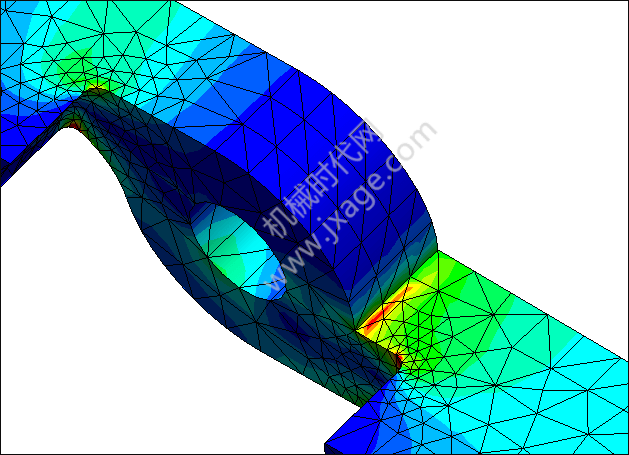
10.结果分析。我们可以看到最大von Mises应力值为163MPa。

11.选择应力1,鼠标右键选择“图标选项”,如下图所示。
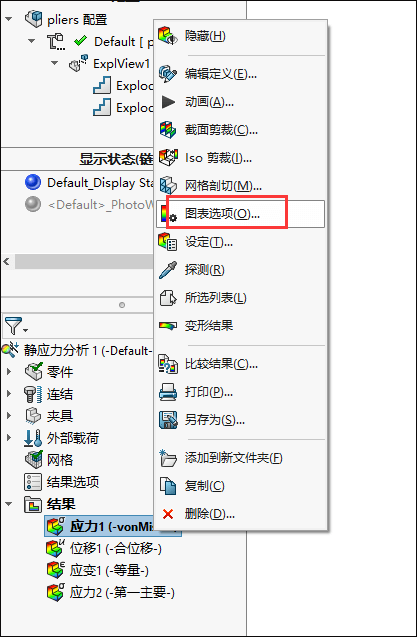
在图标选项中,输入最大和最小的应力值,如下图所示。
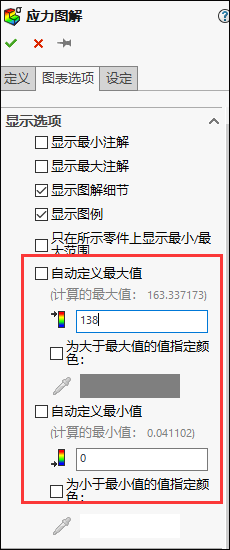
将设定中的“边缘选项”设置为离散。
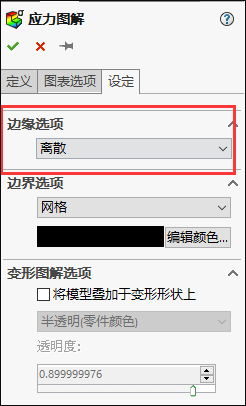
这样超过138MPa的区域会自动显示为红色。
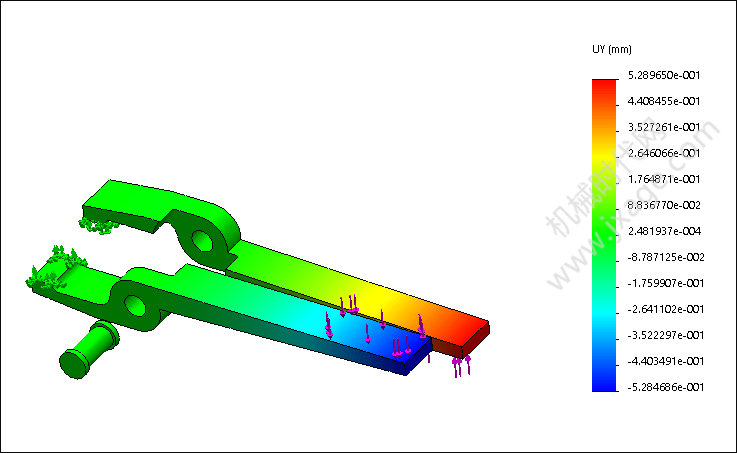
12.为了得到手柄末端的位移,选择位移1,鼠标右键选择“编辑定义”。

选项UY作为位移分量,可以得到手柄末端沿Y方向的最大位移,如下图所示。
模型下载:
此处为隐藏的内容
注册登录后,方可查看
登录
Proe知识
扫二维码关注微信公众号

我的微信
SolidWorks技巧
扫二维码关注微信公众号

我的公众号