

问题分析:
夹钳的一臂承受14000N的力而弯曲,另一臂置于刚性支撑上,确定载荷是否会使得两臂端部接触,以及卸载力之后,夹钳是否会永久保持弯曲。
文章末尾下载模型
方法:
1.打开零件。
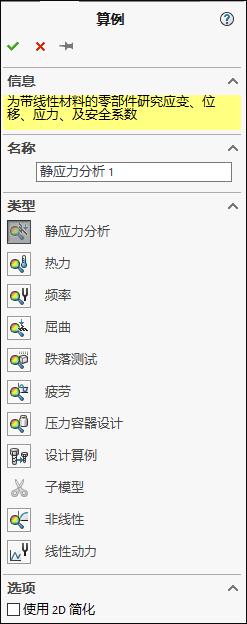
2.我们新建一个静应力分析的算例,如下图所示。
3.查看材料属性。我们可以看到材料属性已自动由SolidWorks导入。

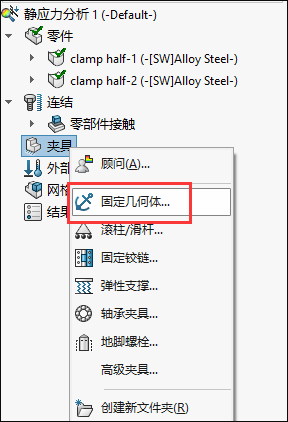
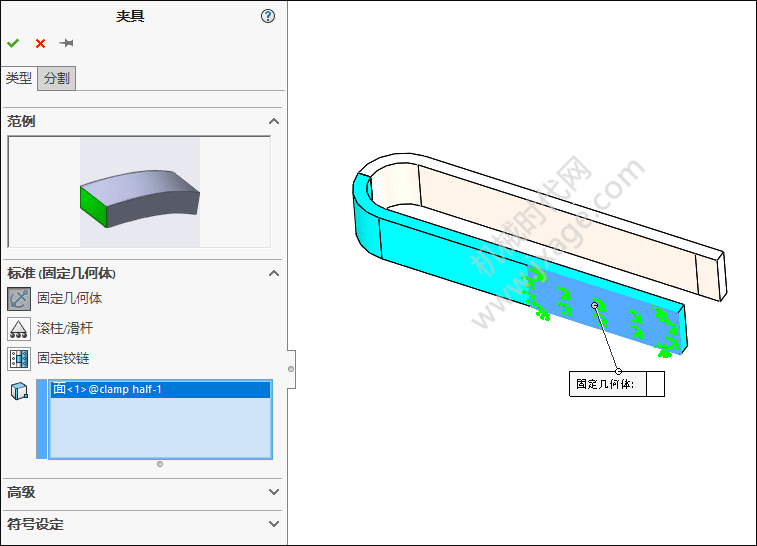
4.添加夹具。我们在钳臂外侧的一个平面上添加固定几何体约束。点击夹具鼠标右键选择“固定几何体”。
在如下图所示的面上添加固定几何体约束。
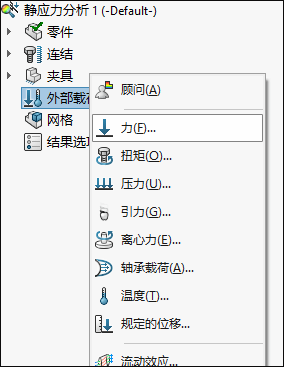
5.施加载荷。选择外部载荷,鼠标右键选择“力”,如下图所示。
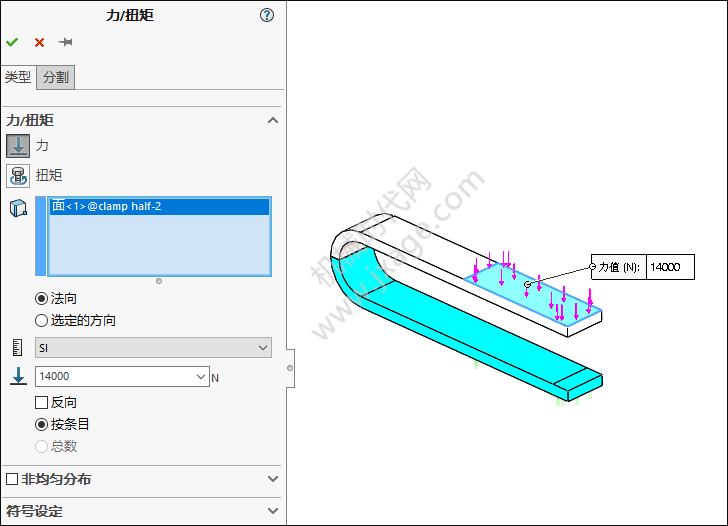
在另外一个钳臂的外侧面上施加14000N的载荷,如下图所示。
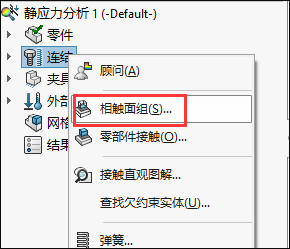
6.定义相触面组。点击连接鼠标右键选择“相触面组”。
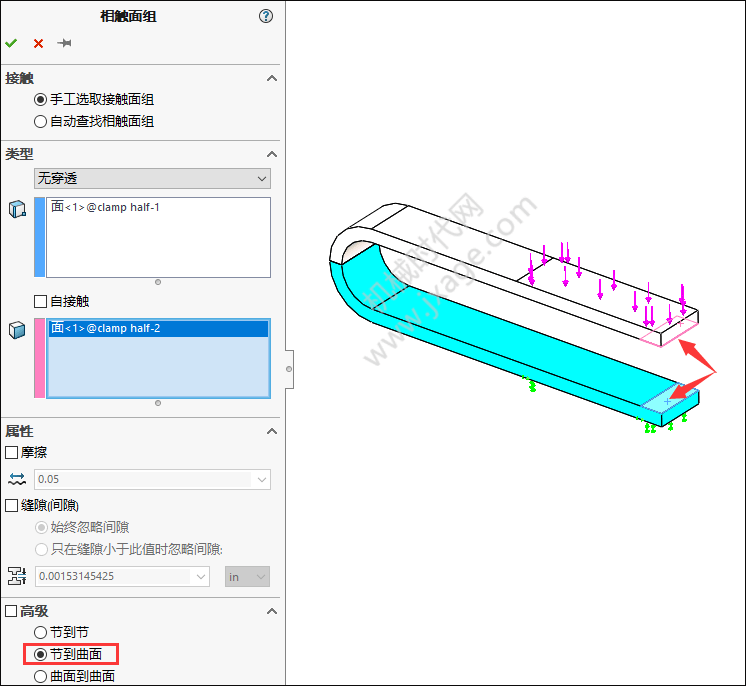
在如下图所示的两个钳臂的内侧由分割线所建立的两个小面上定义相触面组,指定“无穿透”和“节到曲面”的选项,如下图所示。
7.划分网格。
按照如下图所示进行设置。
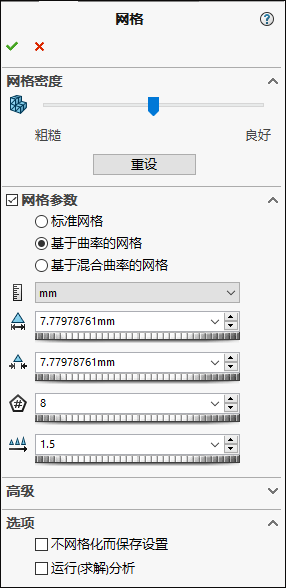
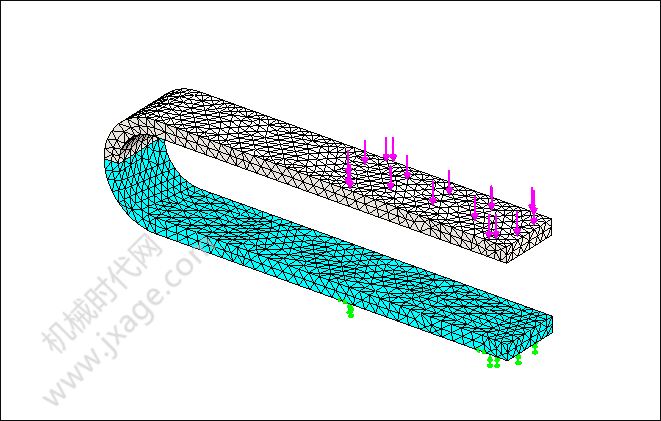
网格划分完毕之后如下图所示。
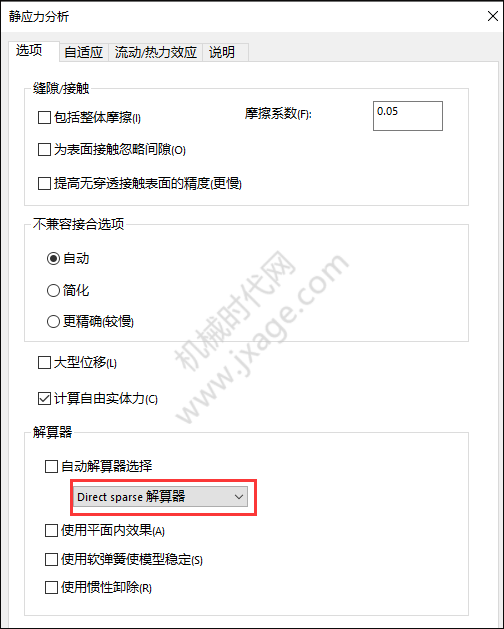
8.点击“静应力分析”,鼠标右键选择“属性”。
指定解算器为Direct Sparse解算器,如下图所示。
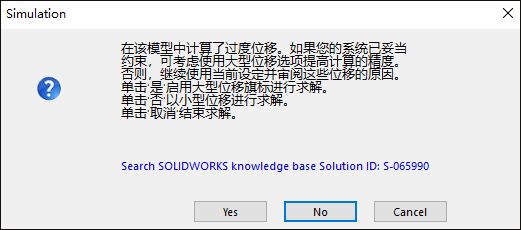
9.运行分析。解算器会自动识别出分析的问题为大位移问题,并发出如下的警告。点击“No”即可,即以线性小位移的模式完成分析。
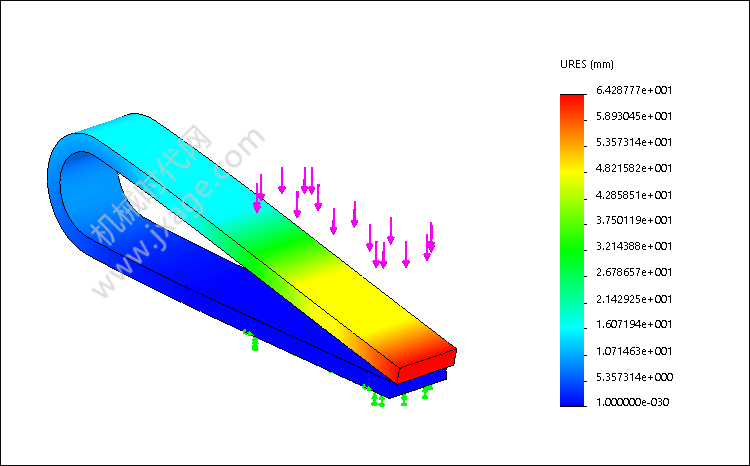
这样我们就得到如下图所示的应力和位移结果。
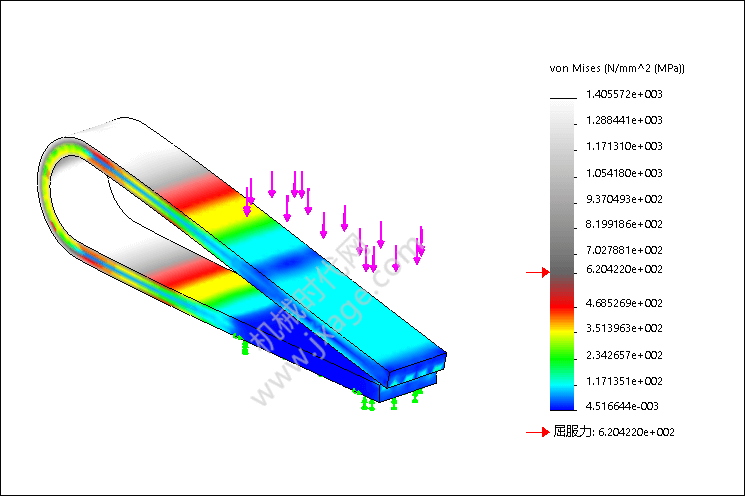
我们可以看到加载载荷的钳臂穿过了固定臂,很明显该结果是错误。因为我们忽略了计算器提出的警告,产生了错误的位移结果。
为了得到正确的结果,我们必须使用大位移的形式。
10.通过复制的方式创建新算例。
11.点击“静应力分析”,鼠标右键选择“属性”。
勾选“大型位移”,如下图所示。

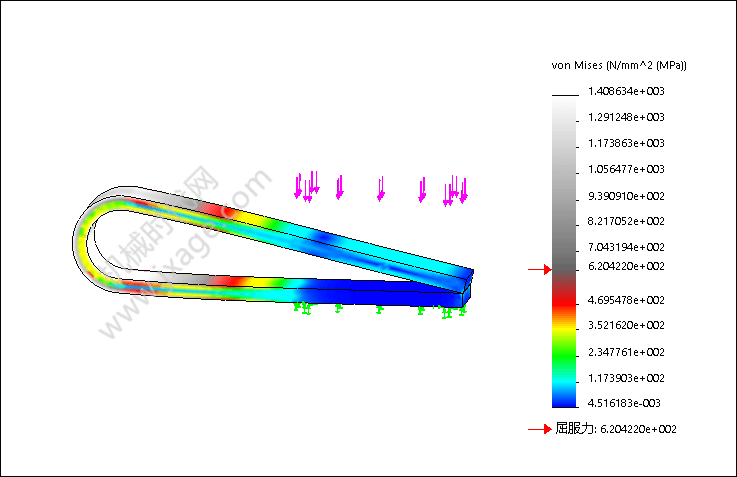
运行分析之后,我们可以看到接触面的端部边缘几乎接触到一起,如预期的一样。很明显的可以看出,夹钳大部分区域承受的应力都高于材料的屈服强度,因此当侧小载荷时,夹钳无法恢复到原先的形状。
要计算永久变形的夹钳在载荷撤销之后的形状和残留应力,必须采用非线性材料模型进行分析。
模型下载:

