

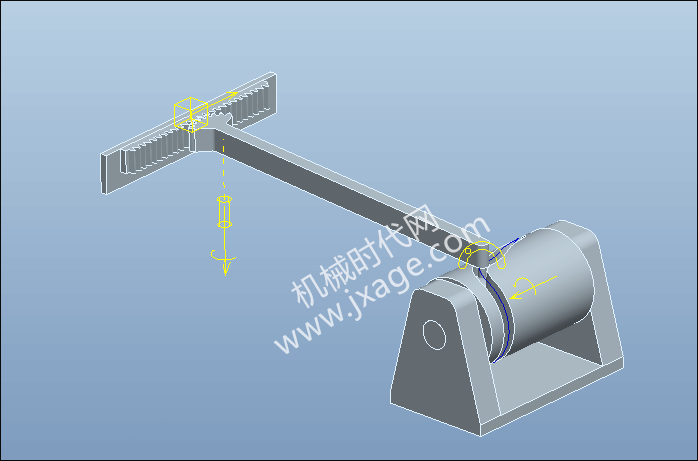
完成后如下图所示。
文章末尾下载模型
方法:
一、装配
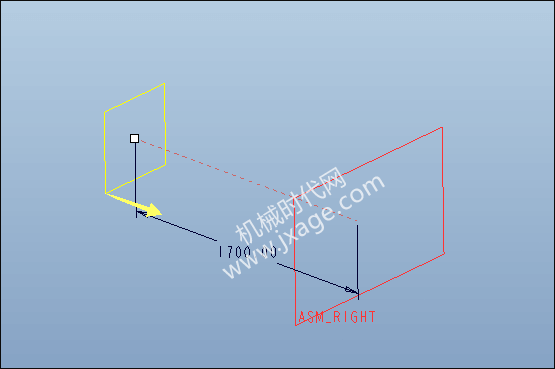
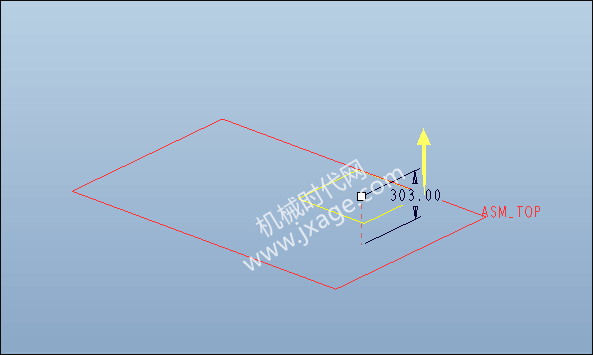
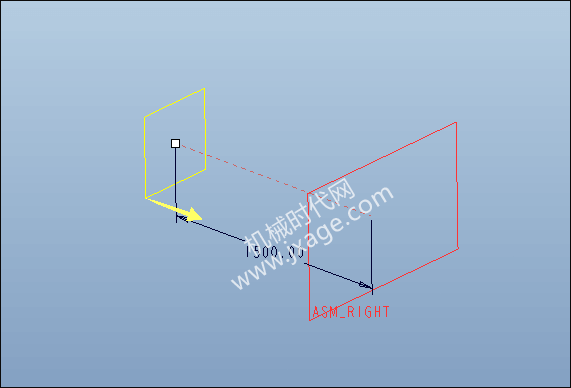
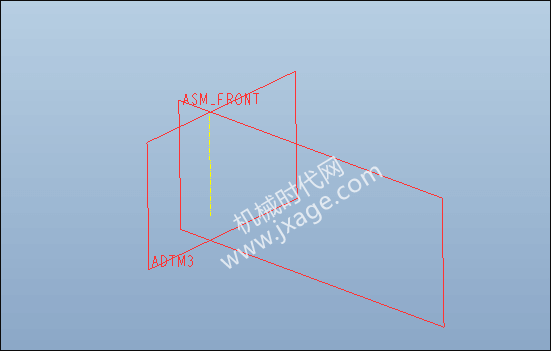
1.首先创建3个基准平面和一个基准轴,方便后面零件的定位。
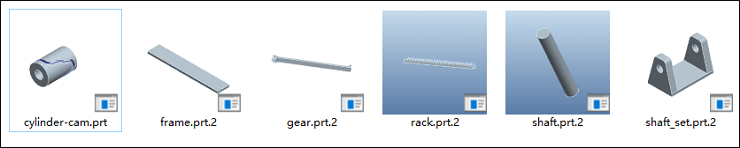
2.整个装配体由以下6个零件组成。
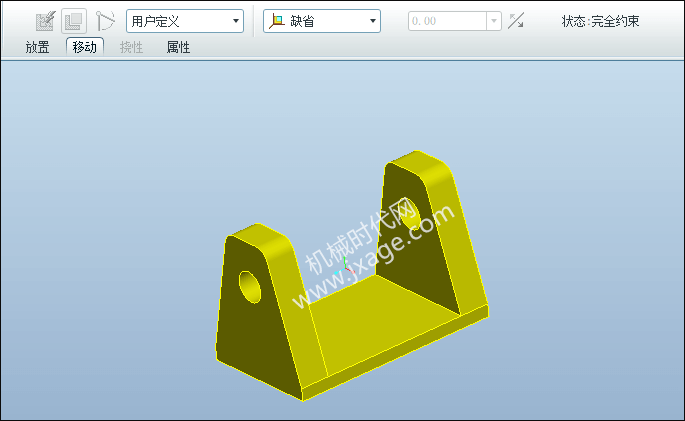
3.首先插入零件shaft_set,以缺省的方式进行放置,
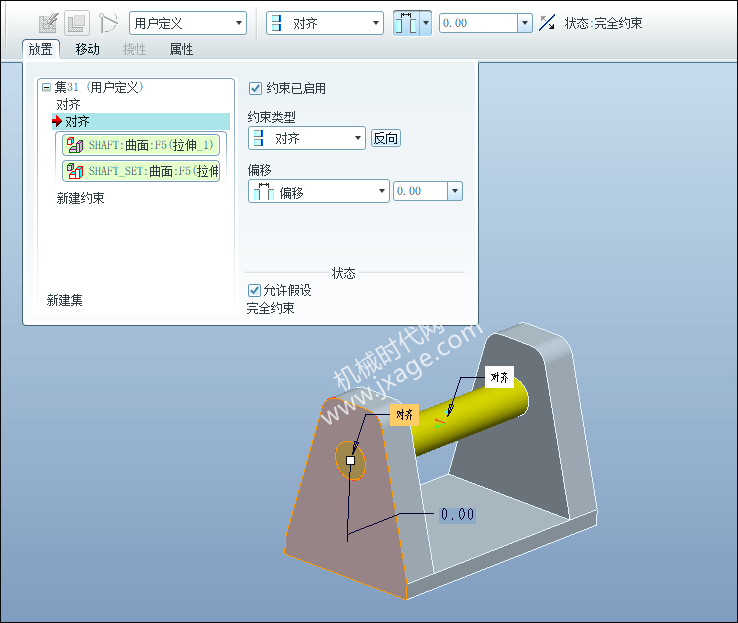
4.插入零件shaft,将如下图所示的两个轴进行对齐。
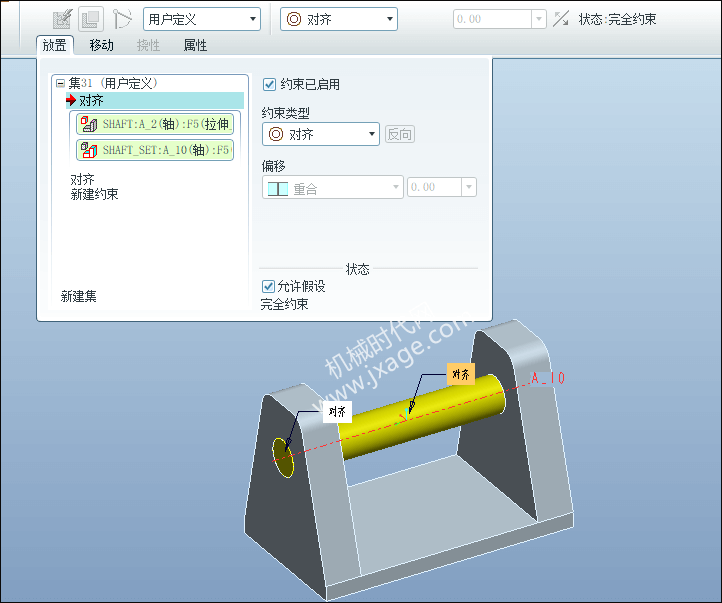
对齐两个端面。
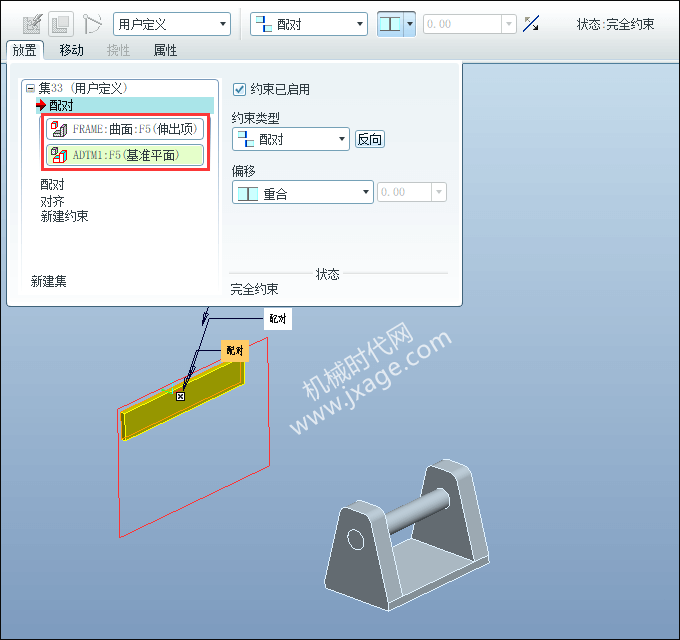
5.插入零件FRAME,将FRAME的面与基准面ADTM1对齐。
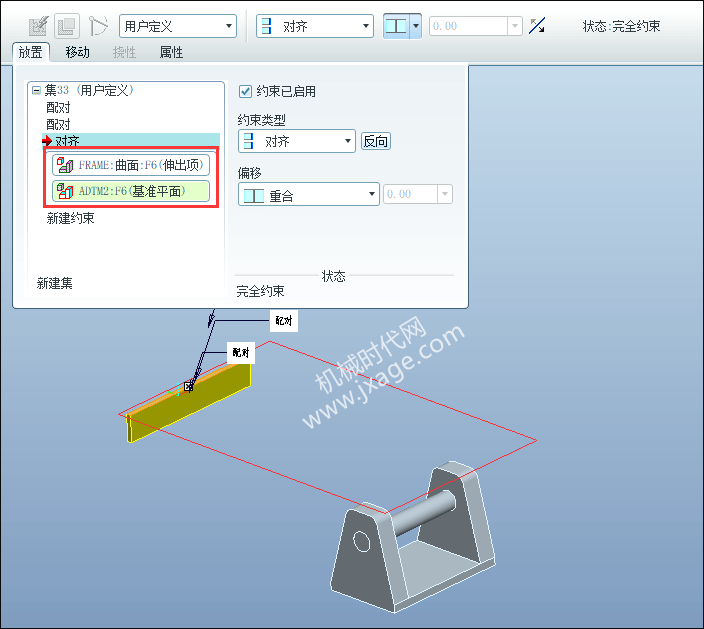
将下面的两个面进行对齐。
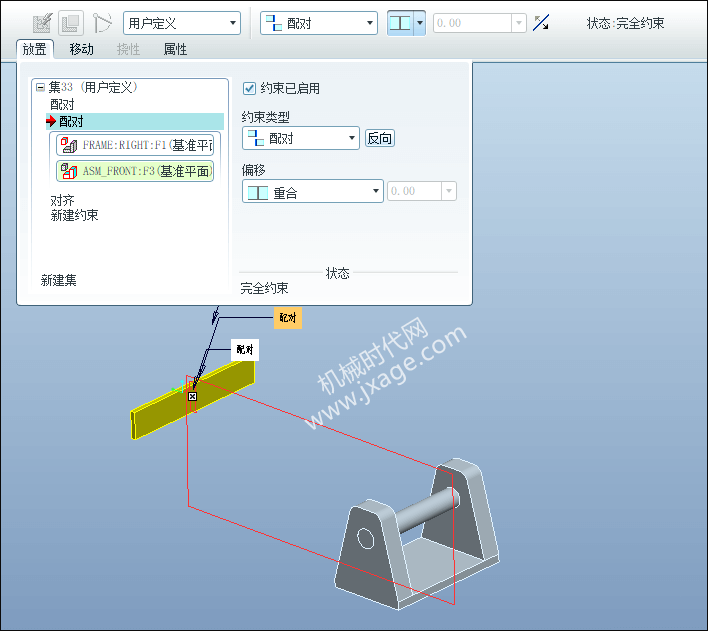
将下面的两个面进行对齐。
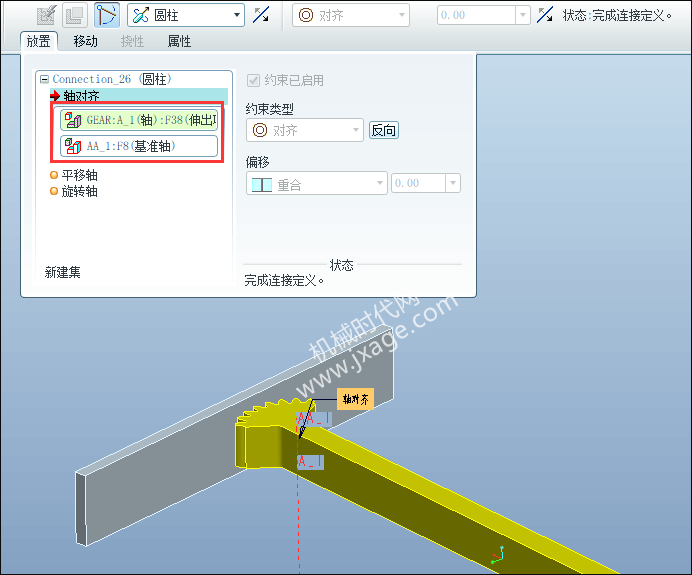
6.插入零件GEAR,选择“圆柱连接”,将GEAR上的基准轴和步骤1创建的基准轴进行轴对齐,点击确定完成。
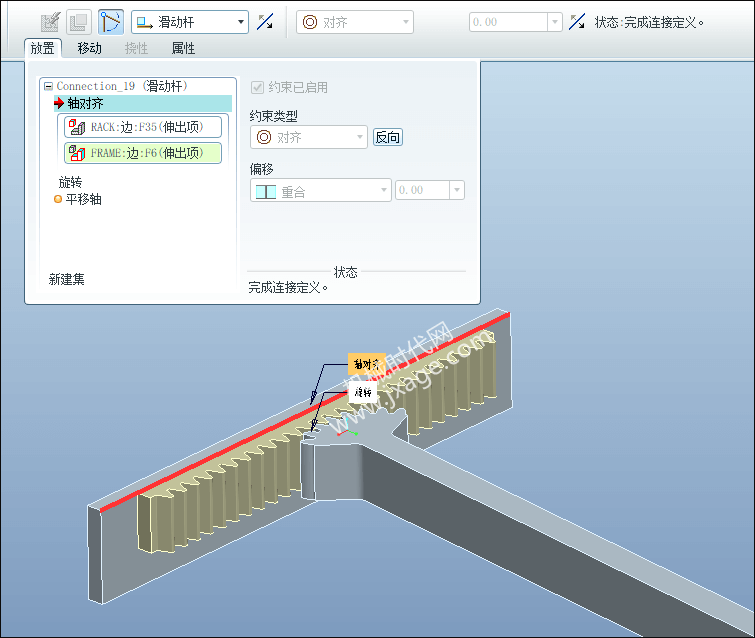
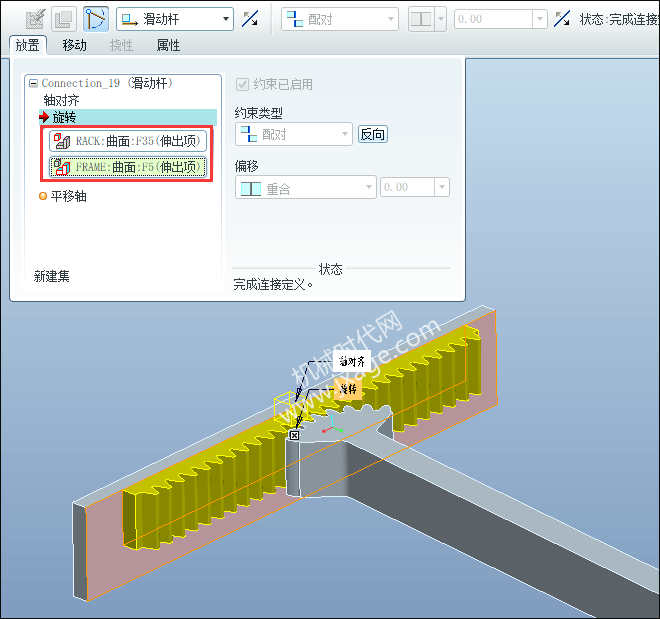
7.插入零件RACK,选择“滑动杆”连接,选择下图FRAME和RACK的两个边进行轴对齐。
将下面的两个面进行对齐。
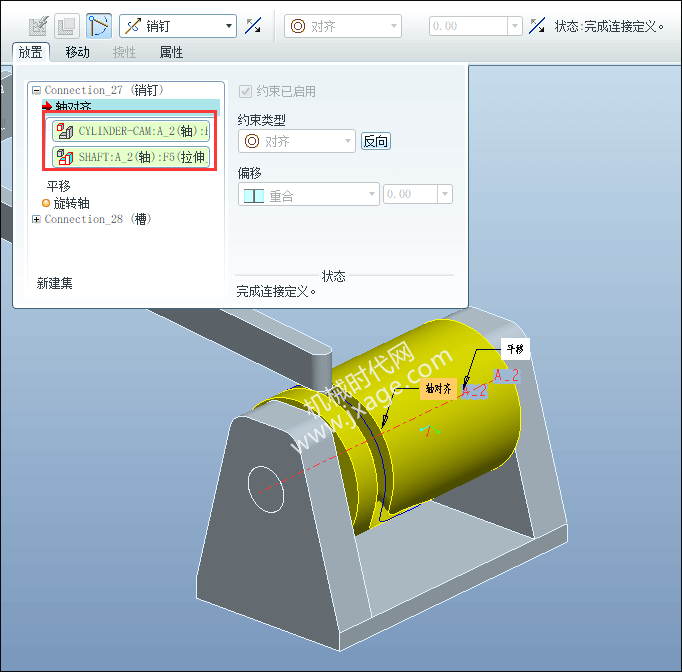
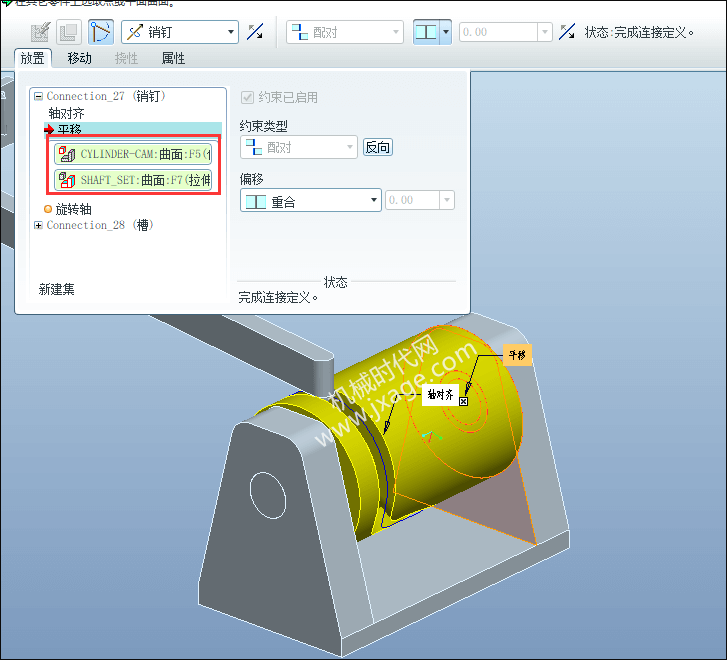
8.插入零件CYLINDER-CAM,选择“销钉连接”,将CYLINDER-CAM和SHAFT的轴进行对齐。
将下面的两个面进行对齐。
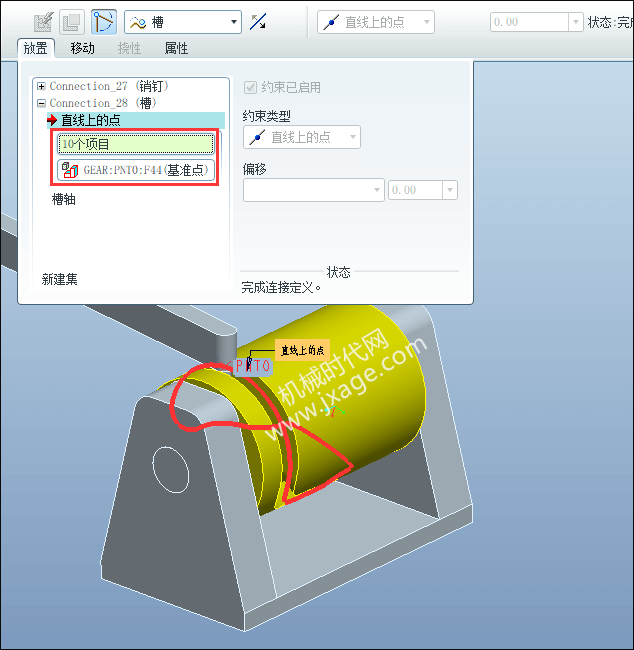
点击新建集,选择“槽连接”,如下图所示。一次选择GEAR上的基准点和下图红色的曲线。
二、仿真设置
1.点击【应用程序】-【机构】,进入机构环境。
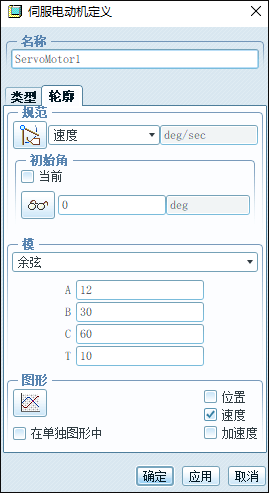
2.点击右侧工具栏的“伺服电动机定义”,选择下图红色箭头所指的运动轴。
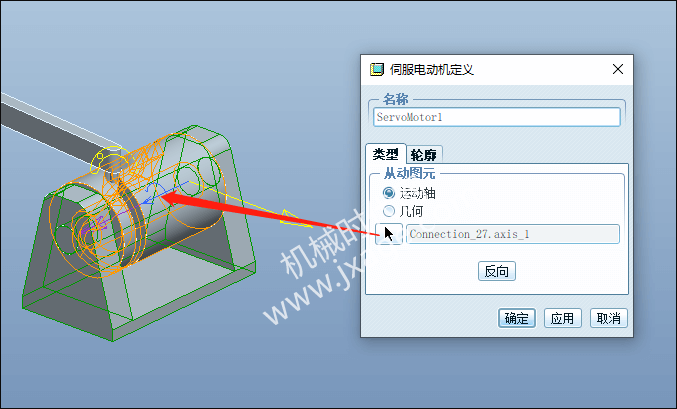
点击“轮廓”栏,按照下图进行对运动轴的速度进行设置。
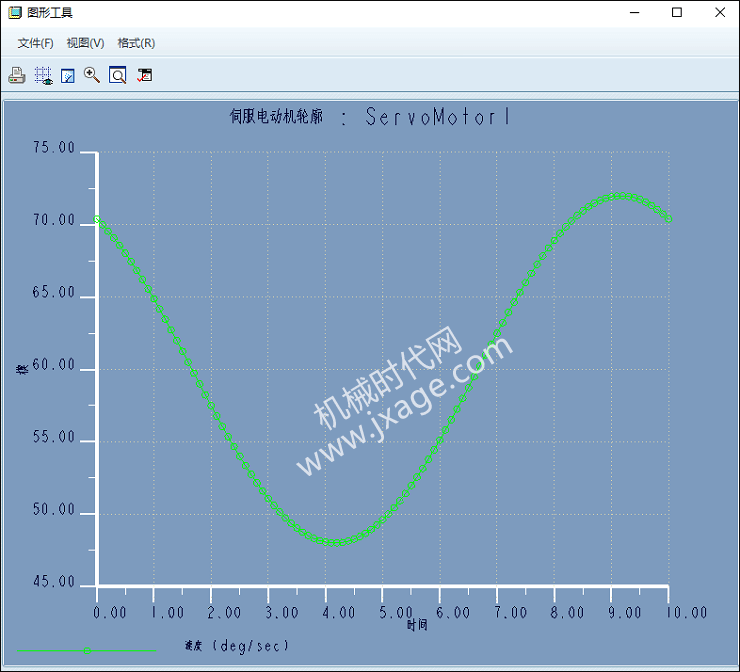
点击窗口中的“图形”按钮,可以看到电动机的速度曲线。
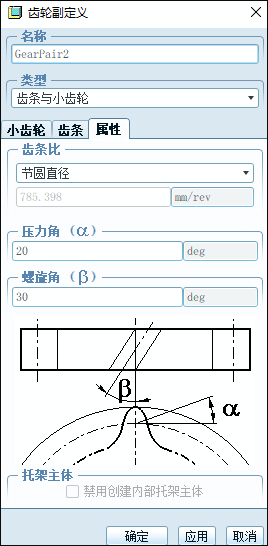
3.点击右侧工具栏的“齿轮副定义”,类型选择“齿条和小齿轮”。
选择下图红色箭头所指的运动轴作为小齿轮的运动轴,节圆直径250。
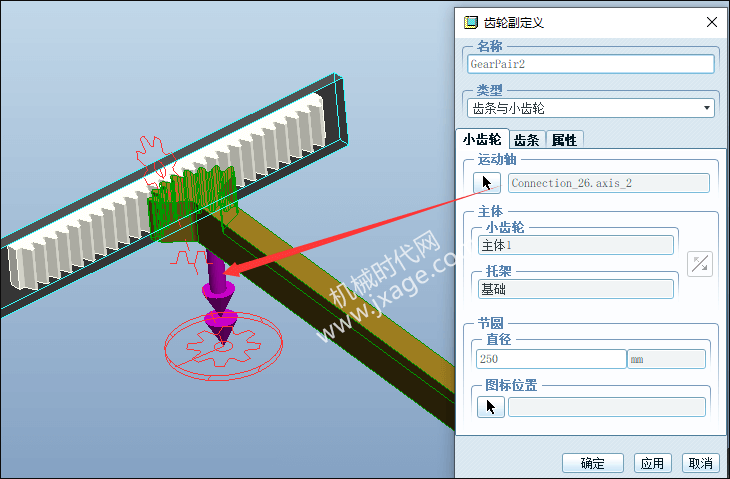
选择下图红色箭头所指的运动轴作为齿条的运动轴。
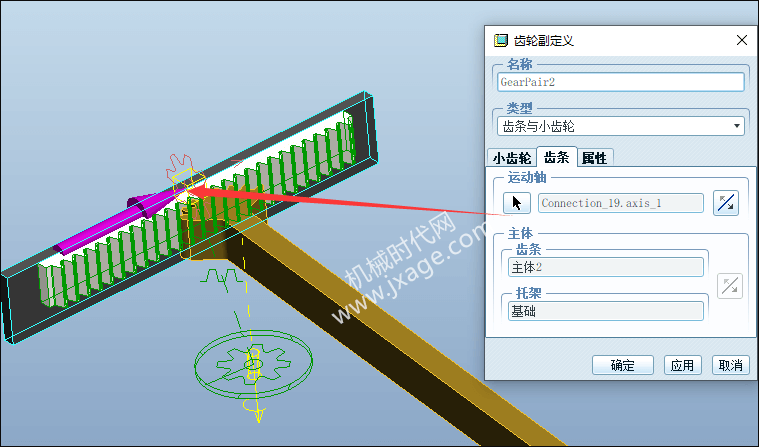
其他按照默认进行设置。
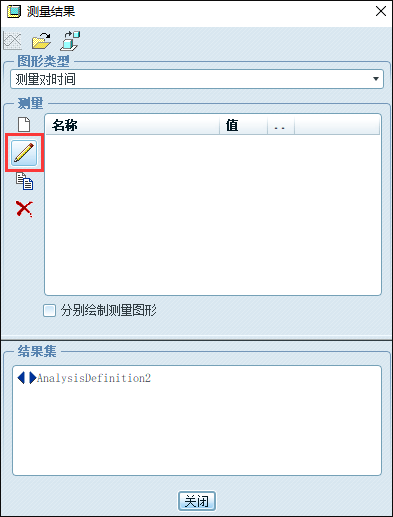
4.设置2个测量的对象。点击“测量结果”,点击下图的红色方框所指的按钮。
测量名称:Bar_Position_in_Cam,类型选择“位置”,选择GEAR上的基准点。

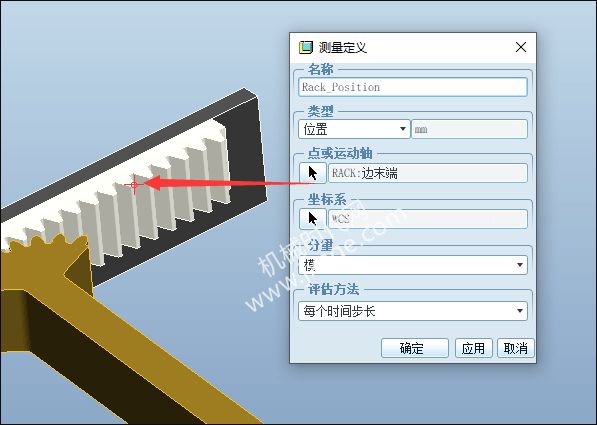
再次新建一个测量:Rack_Position,类型选择“位置”,选择RACK上的任意一点。
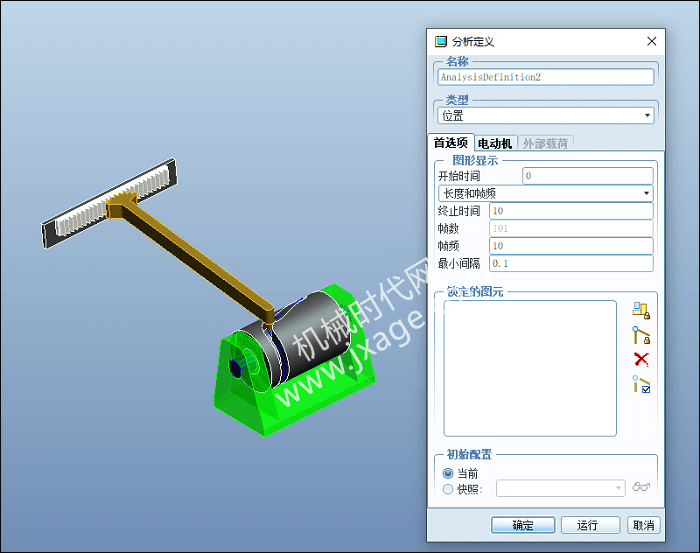
5.点击右侧工具栏的“分析定义”,设置终止时间为10s,点击运行。
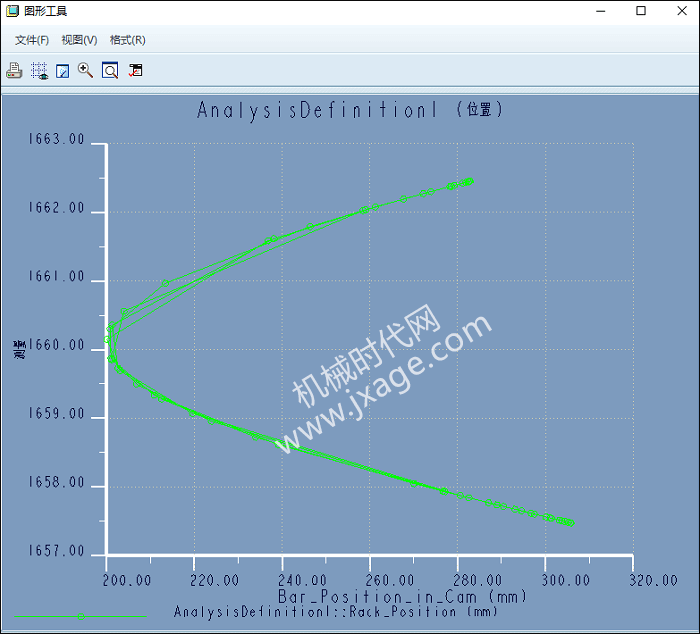
6.显示测量结果。按照下图所示的顺序进行设置。
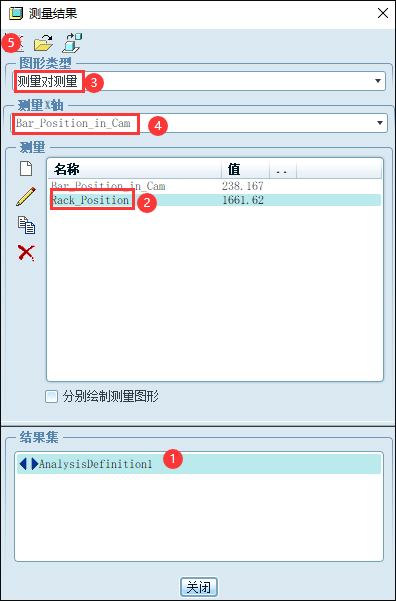
我们就可以得到圆柱凸轮上的从动杆位移和齿条位移的关系。
模型下载:


1F
登录回复
没有得下载
B1
登录回复
@ Wilson1993 在文章末尾